
Gysgaça syn
CNC maşyn guraly, mehaniki önümçilik enjamlarynda çeýe, uniwersal, ýokary takyklyk, ýokary derejeli mehaniki önümçilik enjamlarynda mehaniki, elektrik, gidrawlik, pnewmatik, mikroelektronika we maglumat we beýleki tehnologiýalaryň toplumlaýyn ulanylmagydyr. netijeliligi "çeýe" awtomatiki önümçilik enjamlary, zerur dürli amallary we ädimleri we iş kodunyň görnüşini we ululygyny sanly kody bilen dolandyrýar, dolandyryş serişdesi arkaly san dolandyryş enjamyna, san maglumat enjamyna giriş maglumatlaryna gaýtadan işlemek we hasaplamak, buýruk dolandyryş maşyn gural ulgamy we hereketlendiriji komponentleri, zerur iş bölegini awtomatiki gaýtadan işlemek. CNC maşyn gurallarynyň tehniki derejesi we metal kesýän maşyn gurallarynyň önümçiligindäki göterimi we umumy eýeçiligi, bir ýurduň milli ykdysady ösüşiniň we senagat önümçiliginiň umumy derejesini anyk kesgitlemek üçin möhüm görkezijilerden biridir. Soňky ýyllarda CNC maşyn gurallarynyň Hytaý kärhanalarynda paýy ýylsaýyn artdy we iri we orta kärhanalarda has köp ulanyldy, umuman kiçi we orta kärhanalarda, hatda ulanylýar aýry-aýry kärhanalar.
CNClathe amal talaplary
- Haçan-da iş bölegi CNC torna bilen gaýtadan işlenende, iýmitiň mukdary köp bolýar, gözleg tizligi pes bolýar we iş böleginiň tekiz dälligi sebäpli gaýtadan işlemek prosesi ýük göterýär.
- Gaýtadan işlemek, iýmitiň mukdary az, gaýtadan işlemegiň netijeliligini üpjün etmek üçin, tizligiň ýokary bolmagy.
- Egriji hereketlendirijiniň pes tizlikli we ýokary tork çykaryjy bolmagy talap edilýär we pyçakly we ýokary tizlikde işläp bilýär.
- Analog signallary almak ýokary çyzyklylygy we pes ýük päsgelçiligini talap edýär.
- Termotoryň sesi az we ulgam awtomatlaşdyryş enjamlaryna päsgelçilik az. Çaltlaşdyryň we mümkin boldugyça az tizläň.
CNClathe KD600 seriýaly önümleriň artykmaçlyklary
Kd600 seriýaly ýokary öndürijilikli wektor inwertory öňdebaryjy akym dolandyryş tehnologiýasyny kabul edýär, pes tizlikde hereketlendirijiniň torky uly, tizligiň takyklygy ýokary, bahasy ýerlikli, funksiýa doly, dessine elektrik toguny gaýtadan işlemek we tizligi yzarlamak we täzeden işlemek. ulgamyň üznüksiz işleýiş mehanizmine ýetmegini üpjün etmek, hereketlendirijiniň iň ýokary netijelilik ýagdaýynda işlemegini üpjün etmek, şonuň üçin pyçak AC servo ulgamynyň ýerine KD600 seriýaly ýokary öndürijilikli wektor inwertoryny ulanmak, gural gurallary pudagy üçin iň gowy saýlawdyr. KD600 seriýaly inwertoryň aşakdaky aýratynlyklary bar:
- Üýtgeşik gowşak magnit dolandyryş tehnologiýasy: pes ýygylykdaky uly tork hereketlendirijisine gowy gözegçilik edip biler, 0 ~ 600Hz işledip biler.
- Çalt togtadylýan tizlik: magnit akymynyň tizlenmegini togtatmak tehnologiýasy motory haýalladyp we gysga wagtda durup biler.
- Tizlik takyklygy we durnuklylygy: tizligi sazlamagyň çyzyklylygy gowy, tizligiň durnuklylygynyň takyklygy ýokary we ýük üýtgän mahaly tizligiň üýtgemegi 5/1000 aralygyndadyr.
- Ajaýyp pes ýygylykly öndürijilik: Boş gaýtadan işlenende güýçli kesiş güýjüni üpjün etmek üçin optimallaşdyrylan PG-wektor dolandyryş algoritmi, pes ýygylykly 1Hz 150% -e çenli tork çykarylyşy.
- “Providemultiple” ýygylyk giriş tertibi: 2 woltly çeşme 0 ~ 10V ýa-da -10V-den + 10V giriş, 1 tok çeşmesi 4 ~ 20mA ýa-da 0 ~ 20mA giriş.
- Tor naprýa .eniýesiniň giň gerimi: Ösen kommutasiýa elektrik üpjünçiligi dizaýny dürli gözenek şertlerinde ulanylyp bilner.
- Ajaýyp önümçilik prosesi: özboluşly örtük galyňlaşdyryş amalyny kabul ediň, howa kanaly içerki PCB-den doly izolirlenýär we metal tozan, poslaýjy gaz we çyglylyk ýaly agyr fiziki gurşawa güýçli uýgunlaşýar.
- Gurlan syzdyryjy siňdiriş zynjyry, enjam jaýy zarýad berlende adam bedenine elektrik togunyň urmagyny ep-esli azaldar.
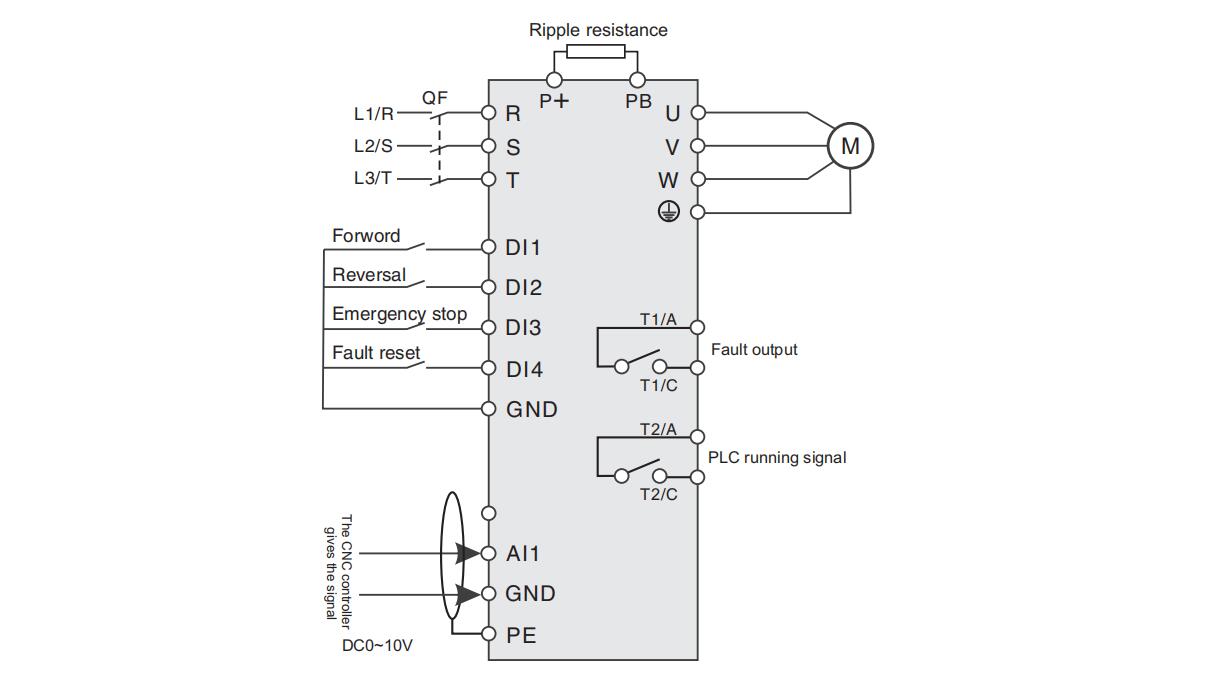
Simleriň esasy diagrammasy
Parametr sazlamalary we beýany
| Parametr sazlamasy | Görkezmeler | Parametr sazlamasy | Görkezmeler |
| P0-03 = 1 | PG wektor tertibi ýok | P4-01 = 11KW | Motoryň bahasy |
| P0-04 = 1 | Daşarky terminal başlaýar ýa-da saklanýar | P4-02 = 380V | Motoryň naprýa .eniýesi |
| P0-06 = 2 | Analog mukdar AI1 berilýär | P4-04 = 22.6A | Motoryň bahasy |
| P0-14 = 150 | Iň ýokary çykyş ýygylygy | P4-05 = 50Hz | Motoryň bahalandyrylan ýygylygy |
| P0-16 = 150 | Operatingokarky iş ýygylygy | P1-06 = 1435RPM | Motor tizligi |
| P0-23 = 1.0 | Tizlenme wagty | P6-00 = 2 | Näsaz çykyş |
| P0-24 = 0.8 | Tizlenme wagty | P6-02 = 1 | Işleýän ýygylyk öwrüjisi |
| P5-00 = 1 | Öňe ylgamak | P5-01 = 2 | Tersine ylga |
| P4-01 ~ P4-06 motor parametrleri takyk giriziň | |||
Düzediş netijesi
KD600 seriýaly ýokary öndürijilikli wektor ýygylyk öwrüjisiniň maşyn gurallarynyň pyçak dolandyryşynyň talaplaryna doly laýyk bolup biljekdigi subut edildi. KD600, dürli bölekleriň gaýtadan işlemek zerurlyklaryny kanagatlandyrmak üçin pes tizlikli (pes ýygylykly) amalda hem 150% torky aňsatlyk bilen çykaryp bilýän we adaty togalanýan rulman gurluşyny we bu eplenjini doly çalşyp bilýän öňdebaryjy PG erkin wektor dolandyryş re modeimini kabul edýär. gurluşy ýönekeý, ykjam we hakyky ädimsiz tizligi kadalaşdyryp biler. Bu pyçagyň tizligi dürli gaýtadan işleýiş proseslerinde çykyş ýygylygyny gözegçilikde saklamak üçin daşarky analog signal bilen dolandyrylýar (meselem, gödeklemek, timarlamak we ş.m.) dürli tizlige mätäç, bu wagt san dolandyryş ulgamy dürli analog naprýa .eniýe signallaryny çykaryp biler dürli tizlige ýetmek üçin inwertor, başlangyç we durmak signaly awtomatlaşdyryş derejesini ýokarlandyrýan we guralyň hyzmat möhletini uzaldýan san dolandyryş ulgamy tarapyndan dolandyrylýar.

Iş wagty: Noýabr-17-2023